자율주행 자동차 개발기 Chapter 1. Ubuntu(듀얼 부팅), ROS 설치

참고사항
이 글은 자율주행 자동차 개발 동아리에서 활동하며 배운 내용을 바탕으로 작성되었습니다.
제목이 자율주행 자동차 개발기이지만 제가 맡은 분야(캘리브레이션)를 중심으로 정리하였습니다. 따라서 실제 자율주행 자동차 개발에 필요한 모든 내용을 다루고 있지는 않습니다.
1. 우분투 설치
1. 디스크 파티션 분할
- 윈도우 아이콘 우클릭 -> 디스크 관리
- 우분투를 설치할 디스크 우클릭 -> 볼륨 축소
- 축소할 공간 입력에 25GB(우분투 권장) 이상 입력 -> 축소 버튼
2. 부팅 USB 제작
우분투(설치 홈페이지) ISO 파일 설치
부팅 USB로 만들 USB 연결
Rufus(설치 홈페이지) 설치, 실행
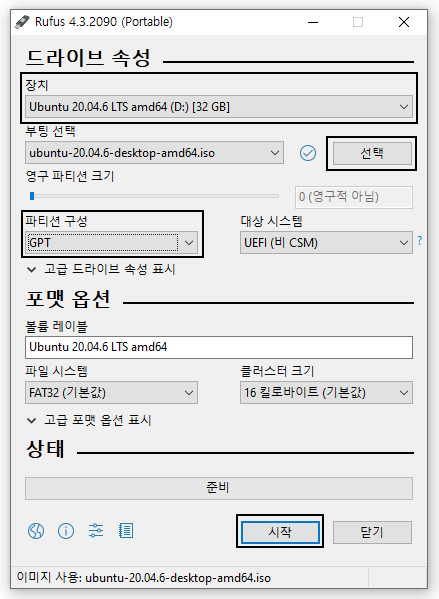
속성 선택
장치 - 원하는 USB 선택
선택 - 1에서 설치한 ISO 파일 선택
파티션 구성 - 우분투를 설치할 디스크에 맞는 파티션 구성 선택
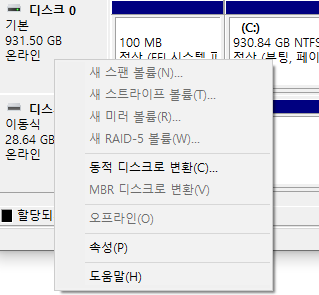
- 디스크 관리에서 우분투를 설치할 디스크 우클릭 -> 속성
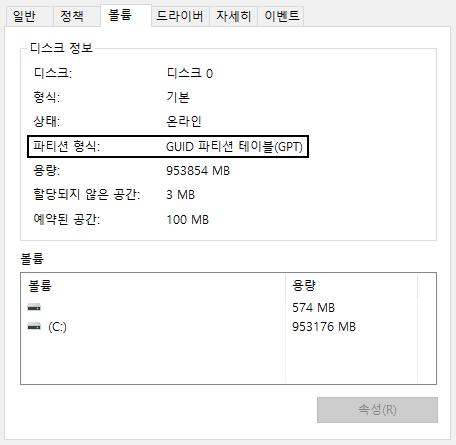
- 파티션 형식 확인(저의 경우 GPT)
시작 버튼
3. 우분투 설치
- 컴퓨터 재부팅 -> 바이오스 진입
- 우분투 USB 선택
- 정보 입력
- Installation type에서 Something else 선택
- free space(분할한 파티션) 더블 클릭 또는
+입력 -> Mount point에/입력 -> OK 버튼 -> Install Now -> Continue - 나머지 정보 입력
와이파이 인식이 안되는 경우!
노트북 와이파이 모듈에 따라 와이파이 인식이 안되는 경우가 있습니다.(저의 경우 Intel AX210을 사용하는 노트북이었습니다. 와이파이 모듈 정보는 메인보드 또는 노트북 회사 제품상세에서 찾을 수 있습니다.)
이 경우 와이파이 드라이버를 따로 설치해주어야 와이파이를 인식할 수 있습니다.
저는 노트북에 LAN 포트가 없어 스마트폰과 블루투스 테더링을 이용해 설치하였습니다. LAN 포트가 있으시다면 유선랜을 사용하시면 됩니다.
와이파이 드라이버 설치 방법
- 이곳에서
.deb로 끝나는 파일 중 최신 파일을 설치 - 터미널에서
cd 경로명령어로 설치한 경로에 이동해sudo dpkg -i 파일이름을 입력- 만약 에러가 발생하는 경우
sudo apt install dkms libc6-dev libc-dev-bin를 입력 후sudo apt --fix-broken install를 입력 - 이제 다시
sudo dpkg -i 파일이름입력
- 만약 에러가 발생하는 경우
- 재부팅
2. ROS 설치
ros 홈페이지에서 패키지를 받아 올 수 있도록 설정
1
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
curl설치1
sudo apt install curl
설치 키 설정
1
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add -
apt 업데이트
1
sudo apt updateros noetic 설치
1
sudo apt install ros-noetic-desktop-full
터미널을 켤 때마다 setup을 해줘야 하므로
~/.bashrc에 setup.bash 추가(~/.bashrc는 터미널이 실행될 때마다 실행됨)1 2
echo "source /opt/ros/noetic/setup.bash" >> ~/.bashrc source ~/.bashrc
필요한 라이브러리들 설치
1
sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential python3-roslaunch
rosdep설정(rosdep은 ros dependencies의 약자로 여러 패키지를 모아놓고 관리하는 도구)1 2
sudo rosdep init rosdep updateros 실행
1
roscore
This post is licensed under CC BY 4.0 by the author.