강화학습 Chapter 2. 마르코프 결정 프로세스(Markov Decision Process)

참고 자료
이 글은 [노승은, 바닥부터 배우는 강화 학습, 영진닷컴(2020)]을 바탕으로 작성되었습니다.
1. 마르코프 프로세스(Markov Process)
마르코프 성질(Markov property)
미래는 오직 현재에 의해 결정된다는 성질 \(\mathbb{P}[s_{t+1}\mid s_t] = \mathbb{P}[s_{t+1}\mid s_0, s_1, ..., s_{t-1}, s_t]\)
- 마르코프한 상태
- 체스: 현재 상황이 가장 중요, 이전에 어떤 상태를 거쳐 현재에 도달했는지는 중요하지 않음
- 마르코프하지 않은 상태
- 운전(특정 시점의 사진): 지금 앞으로 가는지, 뒤로 가는지 조차 알기 어려움
- 현재 뿐만 아니라 이전 상태의 정보(1, 2, 3초전의 사진)나 현재 상태에 대한 더 많은 정보(속도, 가속도)를 통해 조금이라도 더 마르코프하게 만들 수 있음
- 마르코프한 상태
마르코프 프로세스
- 다음 상태로 전이할 확률이 현재 상태에만 의존하는 확률 과정(마르코프한 과정)
- \(s_t\)에서 \(s_{t+1}\)로 전이할 확률은 \(s_t\)하고만 관련이 있음, \(s_0, s_1, ..., s_{t-1}\)과는 관련이 없음
- 예)
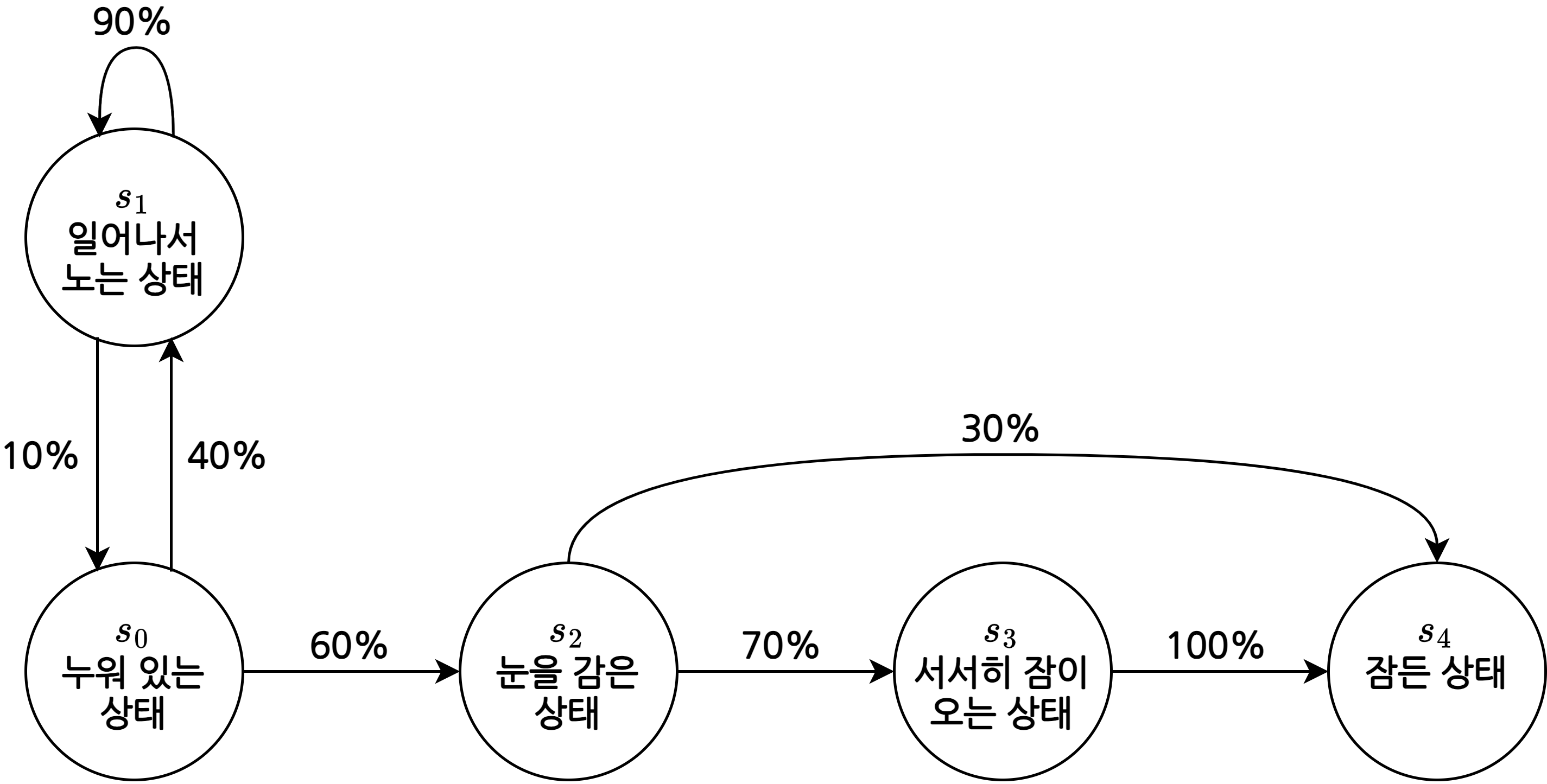
- 시작 상태: \(s_0\), 종료 상태: \(s_4\)
- 1분마다 다음 상태로 상태 전이(state transition)
- 각각의 상태는 다음 상태가 어디가 될지에 해당하는 확률이 있으며, 확률의 합은 100%
- \(s_0\)에서는 40%의 확률로 \(s_1\)으로, 60%의 확률로 \(s_2\)로 전이
- \(s_1\)에서는 90%의 확률로 \(s_1\)으로, 10%의 확률로 \(s_0\)로 전이
- \(s_2\)에서는 70%의 확률로 \(s_3\)로, 30%의 확률로 \(s_4\)로 전이
- \(s_3\)에서는 100%의 확률로 \(s_4\)로 전이
- \(s_4\)에서는 종료(100%의 확률로 \(s_4\)로 전이)
종료 상태에서는 자신에게 전이할 확률이 100%라고 생각할 수 있음
- 상태의 집합 \(S\)
- 가능한 상태들을 모두 모아놓은 집합
- 예) \(S=\{s_0, s_1, s_2, s_3, s_4\}\)
- 가능한 상태들을 모두 모아놓은 집합
- 전이 확률 행렬 \(P\)
전이 확률 행렬(transition probability matrix)
- 전이 확률 행렬 \(P\)
전이 확률
\[P_{ss^\prime}=\mathbb{P}[S_{t+1}=s^\prime\mid S_t=s]\]- \(t\)에서의 상태가 \(s\)일 때, \(t+1\)에서의 상태가 \(s^\prime\)일 확률
- 예) \(P_{s_0s_2}=0.6\)
전이 확률을 행렬 형태로 표현할 수 있음
- 예)
- \(s_0\)행, \(s_2\)열(\(P_{s_0s_2}\)) = 0.6
2. 마르코프 리워드 프로세스(Markov Reward Process)
마르코프 리워드 프로세스
- 마르코프 프로세스에 보상의 개념이 추가
예)
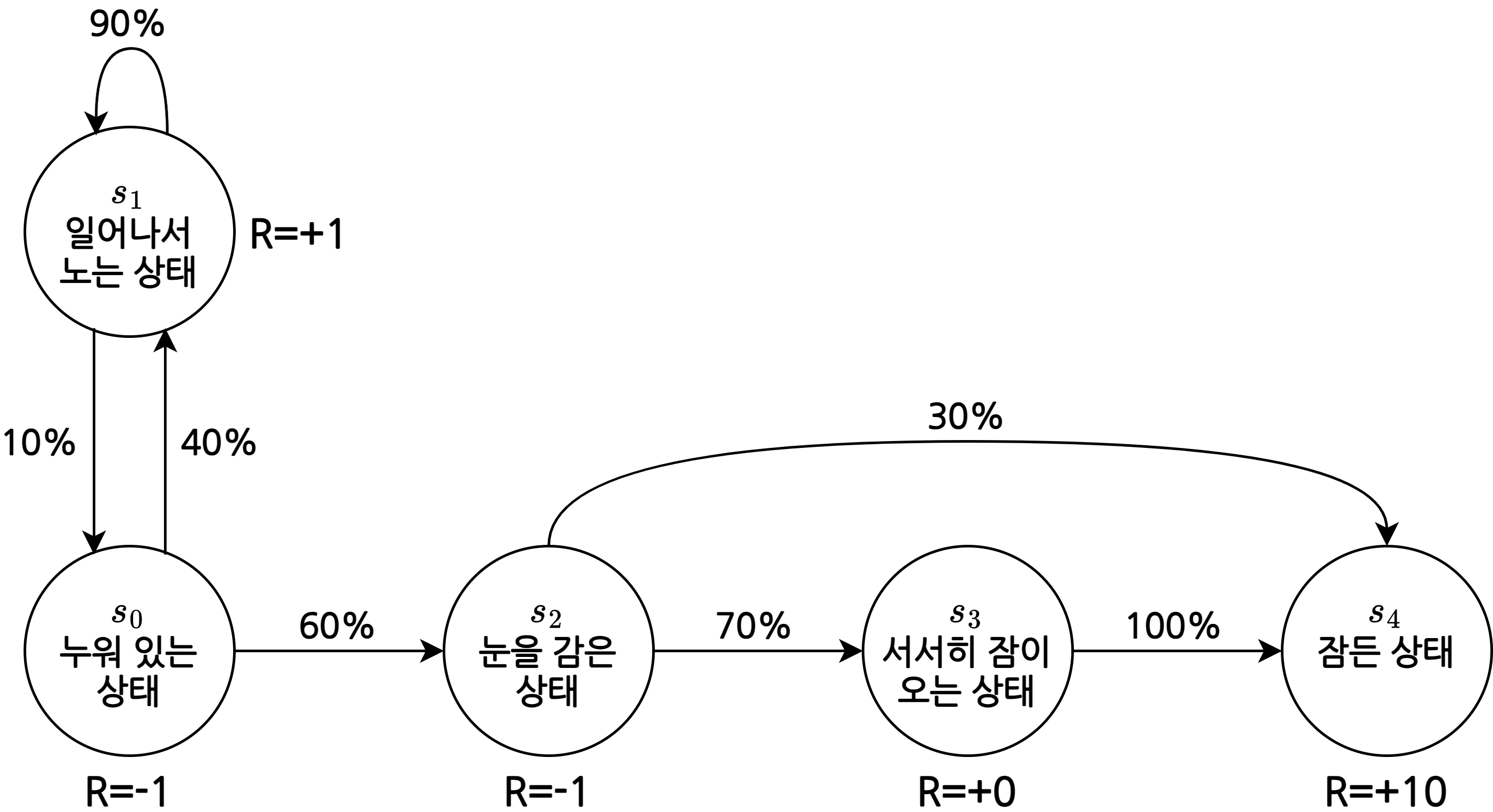
- 마르코프 프로세스 예시에서 보상이 추가된 형태
- 상태의 집합 \(S\)
- 마르코프 프로세스의 \(S\)와 같음
- 전이 확률 행렬 \(P\)
- 마르코프 프로세스의 \(P\)와 같음
보상 함수 \(R\)
\[R = \mathbb{E}[R_t\mid S_t=s]\]- 상태 \(s\)에 도착했을 때 받게 되는 보상의 기댓값
- 기댓값인 이유는 특정 상태에 도달했을 때 받는 보상이 매번 달라질 수 있기 때문
- 예) 동전을 던져 앞면이 나오면 500원을 갖고 뒷면이 나오면 갖지 못한다고 할 때, 보상은 바뀌지만 기댓값은 250원으로 설정할 수 있음
- 상태 \(s\)에 도착했을 때 받게 되는 보상의 기댓값
- 감쇠 인자 \(\gamma\)
- 0과 1 사이의 수
- 미래에 얻게 될 보상에 비해 당장 얻게 될 보상을 얼마나 중요하게 여길지를 나타내는 파라미터
- 미래에 얻을 보상일수록 \(\gamma\)가 여러번 곱해져 작게 만듦
감쇠된 보상의 합, 리턴(return)
- MRP에서는 상태가 바뀔 때마다 보상을 받음
- 상태 \(s_0\)에서 보상 \(R_0\)를 받고 시작하여 종료 상태 \(S_T\)에서 보상 \(R_T\)를 받고 끝남
- 이와 같은 하나의 여정을 에피소드(episode)라고 함
리턴 \(G_t\)
\[G_t = R_{t+1} + \gamma R_{t+2} + \gamma^2 R_{t+3} + \cdots\]- \(t\)부터 미래에 받을 감쇠된 보상의 합
- 감쇠 인자 \(\gamma\)를 통해 미래에 얻게 될 보상에 가중치를 줄 수 있음
- \(\gamma=0\)이면 미래의 보상을 모두 0이 되기 때문에 매우 그리디(greedy)하게 됨
- \(\gamma=1\)이면 매우 장기적인 시야를 가지게 됨
- 강화 학습은 리턴이 최대가 되는 방향으로 학습하는 것
\(\gamma\)가 필요한 이유
- 수학적 편리성
- \(\gamma\)를 1보다 작게 하여 \(G_t\)가 지나치게 큰 값을 갖는 것을 방지
- 여러가지 성향 설정 가능
- 당장 눈앞의 보상을 더 선호하거나 매우 먼 미래의 보상을 더 선호하도록 설정 가능
- 미래에 대한 불확실성 반영
- 미래에 대한 불확실성을 반영하기 위해 감쇠
에피소드 샘플링
- 시작 상태 \(s_0\)에서 출발하여 종료 상태 \(s_T\)에 도달할 때, \(s_1\)을 방문할 수도 있고, 방문하지 않을 수도 있음
- 따라서 이에 따른 리턴도 달라짐
- → 에피소드를 어떻게 샘플링(sampling) 하느냐에 따라 리턴이 달라짐
- Monte-Carlo 접근법: 샘플링을 통해 값을 유추하는 방법
- 예)
- 에피소드 샘플링
- 에피소드 1: 누움 → 일어남 → 누움 → 눈 감음 → 잠이 옴 → 잠듦
- 에피소드 2: 누움 → 일어남 → 일어남 → 누움 → 눈 감음 → 잠이 옴 → 잠듦
- 에피소드 3: 누움 → 눈 감음 → 잠이 옴 → 잠듦
- 전이 확률 행렬 \(P\)를 이용해 무한히 샘플링 가능
- 에피소드 샘플링
상태 가치 함수(State Value Function)
\[v(s) = \mathbb{E} [G_t\mid S_t=s]\]- 상태 \(s\)로부터 시작하여 얻는 리턴의 기댓값
- 가능한 에피소드가 무한하기 때문에 샘플링을 통해 얻은 리턴의 평균으로 밸류를 근사 계산
- 예)
- 에피소드 1: 누움 → 일어남 → 누움 → 눈 감음 → 잠이 옴 → 잠듦
- \(-1 + 1 \times 0.9 - 1 \times 0.9^2 - 1 \times 0.9^3 + 0 \times 0.9^4 + 10 \times 0.9^5 \approx 4.3\)
- 에피소드 2: 누움 → 일어남 → 일어남 → 누움 → 눈 감음 → 잠이 옴 → 잠듦
- \(-1 + 1 \times 0.9 + 1 \times 0.9^2 - 1 \times 0.9^3 - 1 \times 0.9^4 + 0 \times 0.9^5 + 10 \times 0.9^6 \approx 4.6\)
- 에피소드 3: 누움 → 눈 감음 → 잠이 옴 → 잠듦
- \(-1 - 1 \times 0.9 + 0 \times 0.9^2 + 10 \times 0.9^3 \approx 5.4\)
- \(v(s_0) = \frac{4.3 + 4.6 + 5.4}{3} \approx 4.8\)
- 에피소드 1: 누움 → 일어남 → 누움 → 눈 감음 → 잠이 옴 → 잠듦
3. 마르코프 결정 프로세스(Markov Decision Process)
마르코프 결정 프로세스
\[MDP \equiv (S, A, P, R, \gamma)\]- 상태의 집합 \(S\)
- 마르코프 프로세스, 마르코프 보상 프로세스에서의 \(S\)와 같음
- 액션의 집합 \(A\)
- 할 수 있는 행동의 집합
- 에이전트는 액션의 집합 중 하나를 선택
전이 확률 행렬 \(P\)
\[P_{ss^\prime}^a = \mathbb{P} [S_{t+1} = s^\prime \mid S_t=s, A_t=a]\]- \(t\)에서 상태가 \(s\)이고 액션 \(a\)를 했을 때, \(t+1\)에서 상태가 \(s^\prime\)가 될 확률
보상 함수 \(R\)
\[R_s^a = \mathbb{E} [R_{t+1} \mid S_t=s, A_t=a]\]- \(t\)에서 상태가 \(s\)이고 액션 \(a\)를 했을 때, \(t+1\)에서 받을 보상의 기댓값
- 감쇠 인자 \(\gamma\)
- MRP에서의 \(\gamma\)와 같음
예)
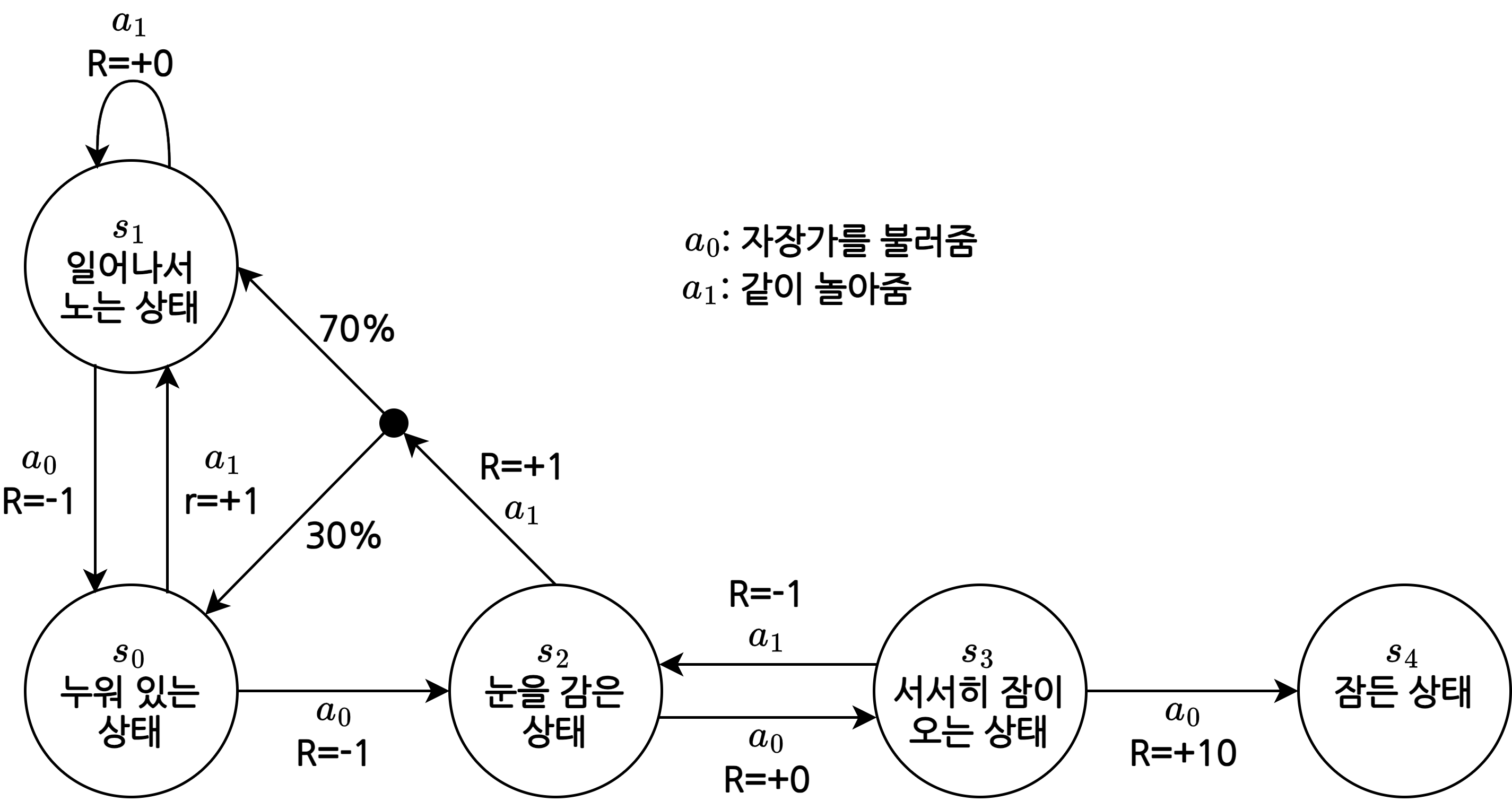
\(P_{s_2,s_0}^{a_1}=0.3\), \(P_{s_2,s_1}^{a_1}=0.7\)
확률 값이 적혀있지 않은 부분은 100%
예) \(P_{s_0,s_2}^{a_0}=1\), \(P_{s_0,s_2}^{a_1}=0\)
MDP가 많이 복잡해지면 어떤 선택을 해야 할지 알기 어려워짐
- 정책(policy): 각 상태에 따라 액션을 선택하는 규칙
정책 함수와 2가지 가치 함수
정책 함수(policy function)
- 각 상태에서 어떤 액션을 선택할지 정해주는 함수
- 상태 \(s\)에서 액션 \(a\)를 선택할 확률
- 예)
- \(\pi(a_{0}\mid s_{0})=0.2\): \(s_0\)에서 \(a_0\)를 선택할 확률이 0.2라는 의미
- \(\pi(a_1\mid s_0)=0.5\): \(s_0\)에서 \(a_1\)을 선택할 확률이 0.5라는 의미
- \(\pi(a_2\mid s_0)=0.3\): \(s_0\)에서 \(a_2\)를 선택할 확률이 0.3라는 의미
- 각 상태에서 할 수 있는 모든 액션의 확률 값을 더하면 1이 되어야 함
상태 가치 함수
\[\begin{align} v_\pi(s) &=\mathbb{E}_\pi[r_{t+1}+\gamma r_{t+2}+\gamma^2 r_{t+2}+ \cdots\mid S_t=s]\\ &=\mathbb{E}_\pi[G_t\mid S_t=s] \\ \end{align}\]- \(s\)부터 끝까지 \(\pi\)를 따라서 움직일 때 얻는 리턴의 기댓값
액션 가치 함수(state-action value function)
\[q_\pi(s,a)=\mathbb{E}_\pi[G_t\mid S_t=s,A_t=a]\]- \(s\)에서 \(a\)를 선택하고, 그 이후에는 \(\pi\)를 따라서 움직일 때 얻는 리턴의 기댓값
\(v_\pi(s)\) vs \(q_\pi(s, a)\)
- ‘\(s\)에서 어떤 액션을 선택하는지‘에만 차이가 있음
- \(v_\pi(s)\)는 \(s\)에서 \(\pi\)가 액션을 선택
- \(q_\pi(s, a)\)는 \(s\)에서 \(a\)를 선택
4. Prediction과 Control
- Prediction: \(\pi\)가 주어졌을 때 각 상태의 밸류를 평가하는 문제
- Control: 최적 정책(optimal policy) \(\pi^*\)를 찾는 문제
- 최적 정책: 모든 \(\pi\) 중 기대 리턴이 가장 큰 \(\pi\)
- 최적 가치 함수(optimal value function) \(v^*\): \(\pi^*\)를 따를 때의 가치 함수
그리드 월드 예시
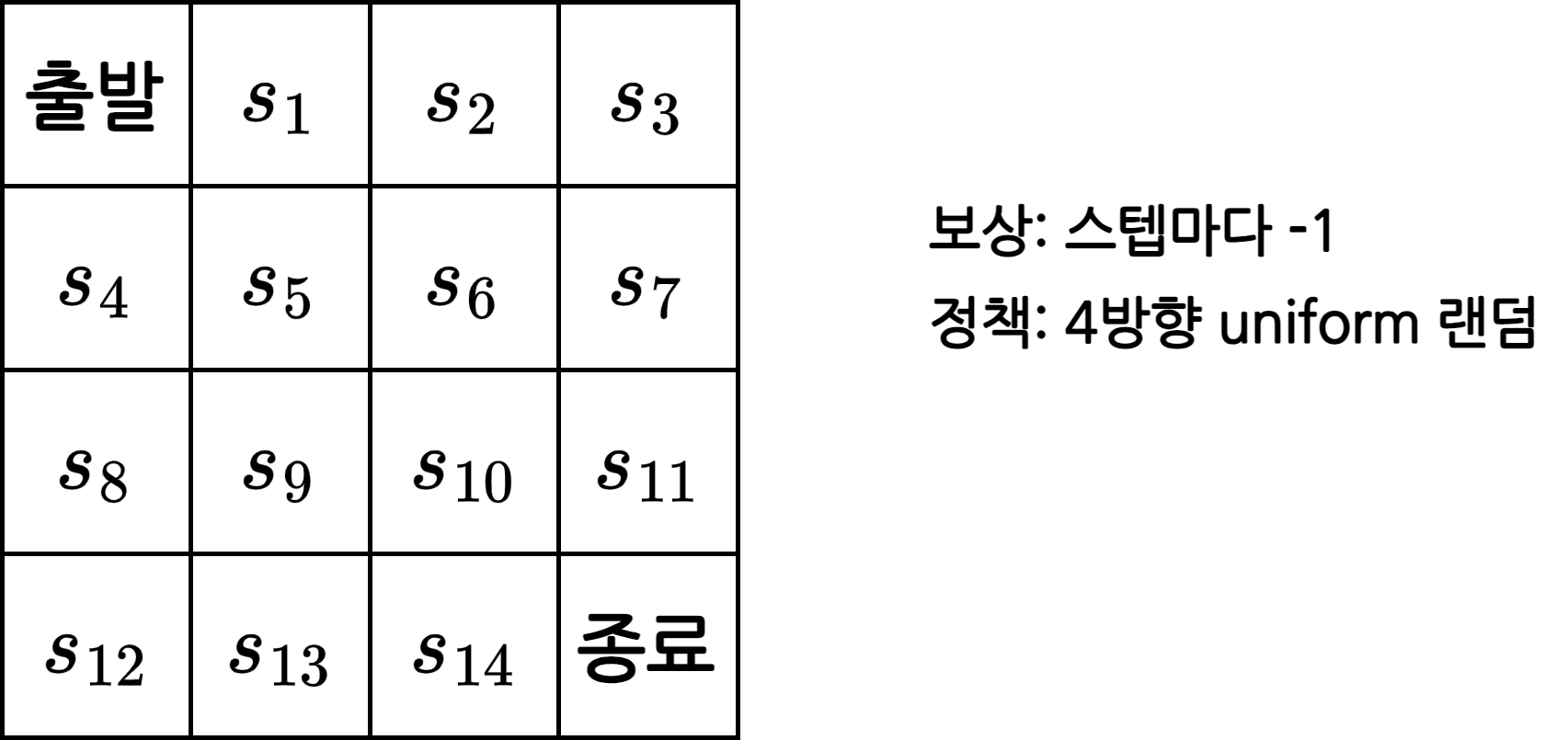
- ‘출발’에서 시작하여 ‘종료’에 도착하면 한 에피소드 종료
- 최단 경로를 통해 종료 상태에 도착하는 에피소드가 리턴이 가장 큼
Prediction
- \(\pi\)가 주어졌을 때 각 상태의 밸류를 평가하는 문제
- 정책 \(\pi\)를 4방향 랜덤으로 가정
- \(\pi(동\mid s)=\pi(서\mid s)=\pi(남\mid s)=\pi(북\mid s)=0.25\)
- \(v_\pi(s_{11})\)를 구하는 것은 매우 복잡
- 언뜻 보면 아래로 1칸 움직이면 끝나므로 간단해 보이지만, 4방향 랜덤이기 때문에 무한한 에피소드가 존재
Control
- 최적 정책 \(\pi^*\)를 찾는 문제
- 항상 동쪽(오른쪽) 또는 남쪽(아래쪽)으로 이동하는 것이 \(\pi^*\)
- 하지만 일반적인 MDP에서 \(\pi^*\)를 찾는 것은 간단하지 않음
This post is licensed under CC BY 4.0 by the author.