강화학습 Chapter 5. MDP를 모를 때 밸류 평가하기

참고 자료
이 글은 [노승은, 바닥부터 배우는 강화 학습, 영진닷컴(2020)]을 바탕으로 작성되었습니다.
MDP를 모를 때 밸류 평가하기
- 이번 챕터에서 다룰 내용의 전제 조건
- 작은 문제
- MDP를 모름
- 모델 프리 상황에서의 prediction 방법에 대해 다룸
- \(\pi\)가 주어졌을 때 가치를 평가하는 방법
1. 몬테카를로 학습
몬테카를로 방법론(Monte Carlo Method)
반복적인 샘플링을 통해 근사적으로 값을 가늠하는 방법
- 예)
- 동전을 던져 앞면과 뒷면이 나올 확률 구하기
- 10번 던져 앞면이 3번 나왔다면 앞면이 나올 확률은 0.3
- 100번 던져 앞면이 35번 나왔다면 앞면이 나올 확률은 0.35
- 더 많이 던질 수록 값이 정확해질 가능성이 큼
- 동전을 던져 앞면과 뒷면이 나올 확률 구하기
- 밸류를 구하기 위해 여러번의 에피소드를 경험시킨 후 얻은 리턴의 평균을 통해 리턴의 기댓값을 구할 수 있음
마찬가지로 샘플이 많을 수록, 즉 여러번의 에피소드를 경험할 수록 밸류의 예측치는 정확해짐
\(v_\pi(s_t) = \mathbb{E}_\pi[G_t]\) 가치 함수는 리턴의 기댓값
몬테카를로 학습 알고리즘
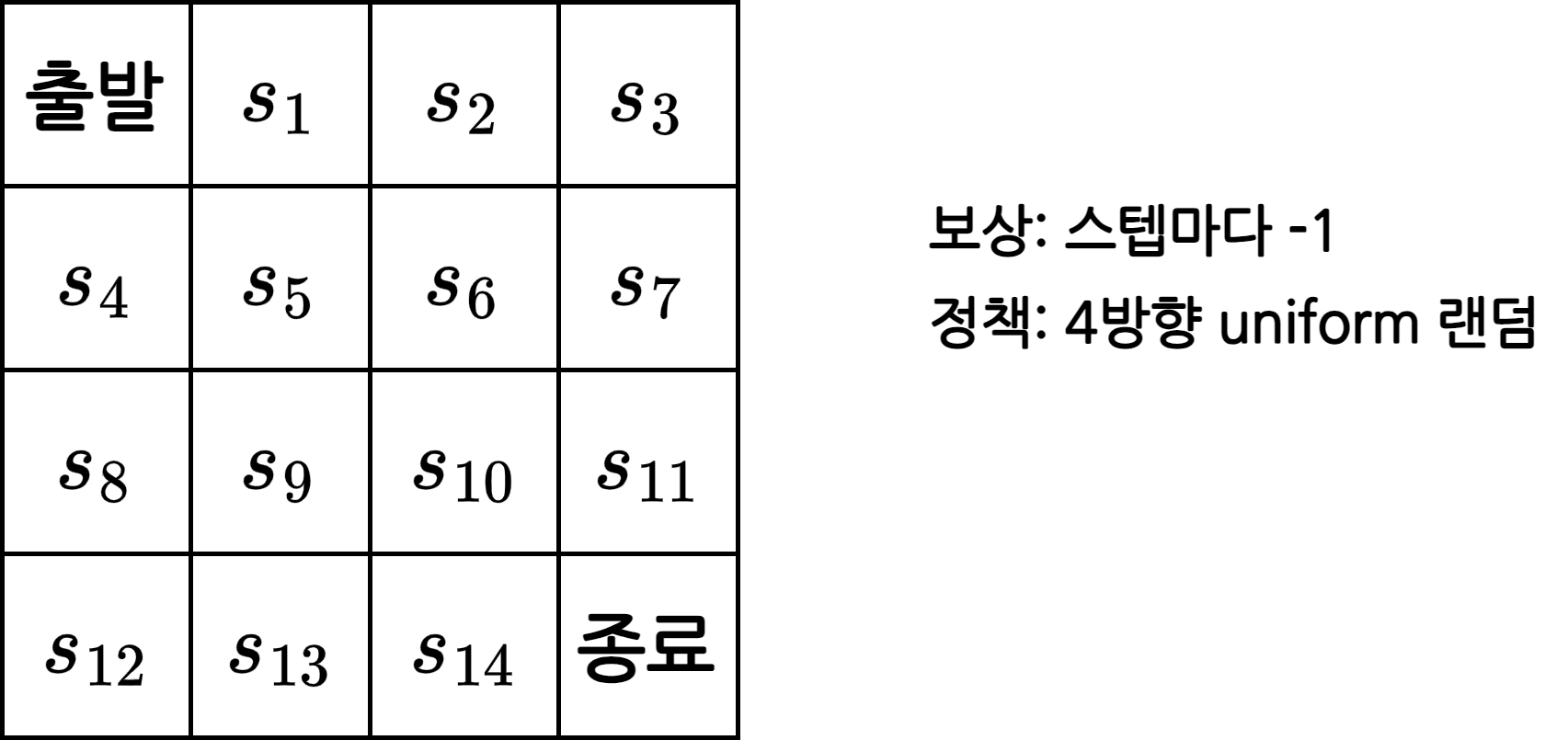
MDP를 모르는 상태라 가정
\(r_s^a\)와 \(P_{ss^\prime}^a\)를 모름
\(r_s^a\)와 \(P_{ss^\prime}^a\)를 모르는 것일 뿐 MDP에는 고정된 \(r_s^a\)와 \(P_{ss^\prime}^a\)가 있음
이전과 마찬가지로 \(r_s^a\)는 스텝마다 -1이며, \(P_{ss^\prime}^a\)도 1로 동일함
현재 에이전트는 액션을 선택했을 때, 어떤 상태에 도달할지 모르는 상황
- 따라서 여러번의 경험을 통해 보상과 전이 함수를 예측해야 함
1. 테이블 초기화
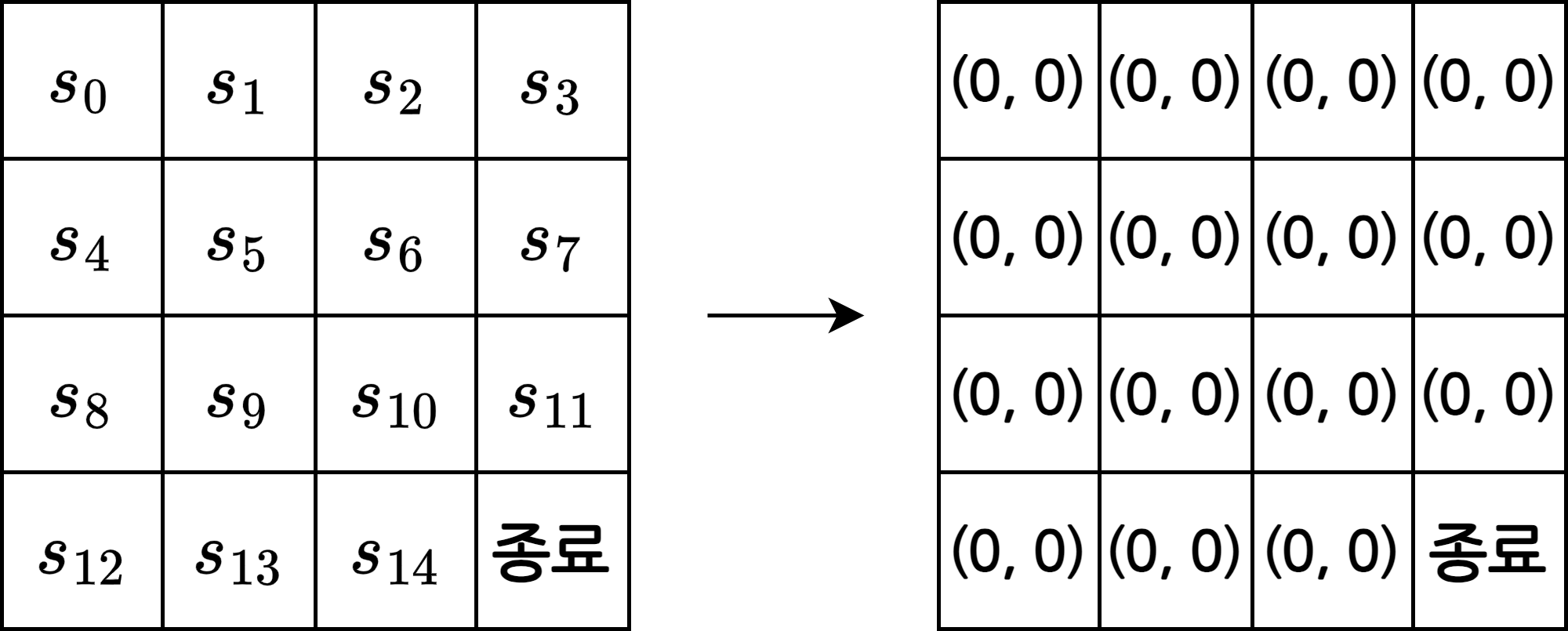
- 상태별로 \(N(s)\)와 \(V(s)\) 값 0으로 초기화
- \(N(s)\): \(s\)를 방문한 횟수
- \(V(s)\): \(s\)에서 경험한 리턴의 총합
2. 경험 쌓기
- 평가하고 싶은 정책 \(\pi\)를 따르는 에이전트가 한 번의 에피소드를 경험
- 한 번의 에피소드를 위와 같이 표현할 수 있음
- 여기서 \(s_0\), \(s_1\), \(s_2\)는 시점 0, 1, 2에서의 상태를 뜻함
- 각 상태에 대한 리턴도 위와 같이 표현할 수 있음
3. 테이블 업데이트
- 2단계의 에피소드에서 방문했던 모든 상태에 대해 \(N(s)\)와 \(V(s)\)를 업데이트
- \(N(s_t) = N(s_t) + 1\)
- \(V(s_t) = V(s_t) + G_t\)
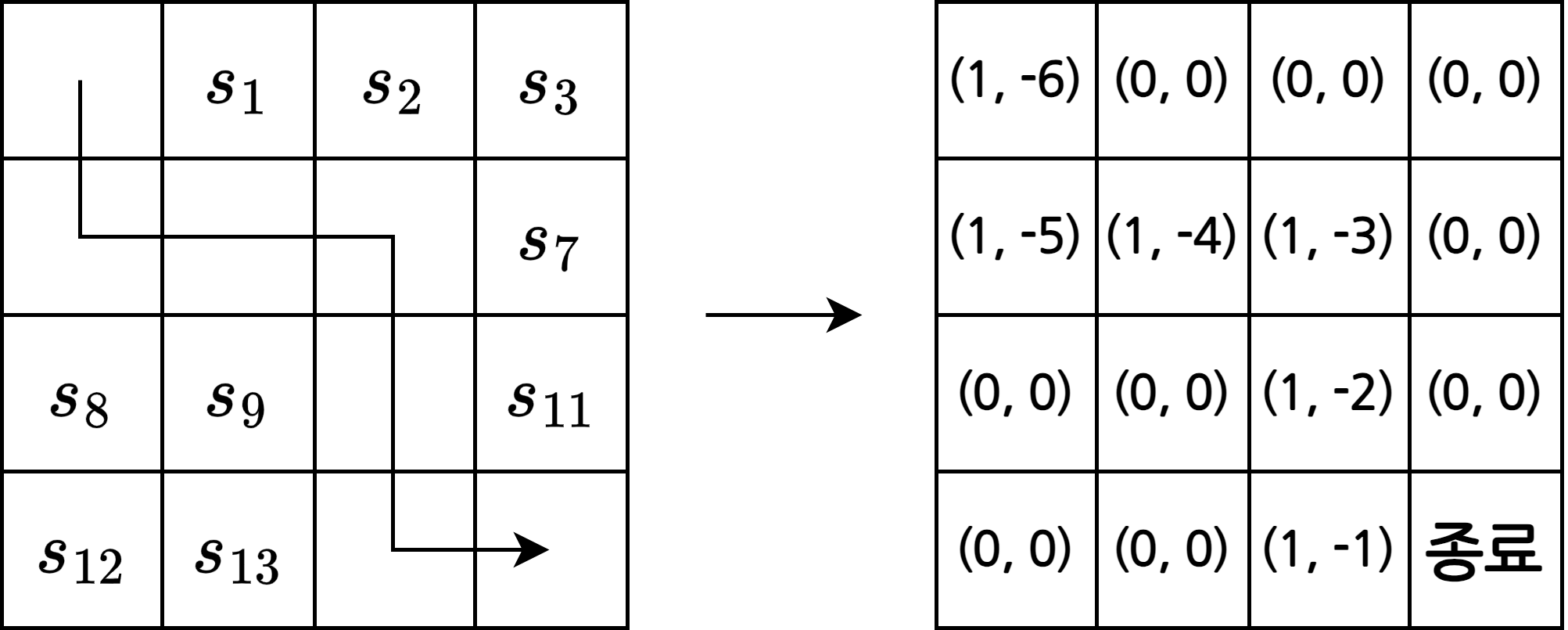
- 만약 왼쪽과 같은 경로로 에피소드를 겪었다면 오른쪽 처럼 값을 업데이트
4. 밸류 계산
- 2단계와 3단계를 충분히 반복한 뒤에 모든 상태에 대해 리턴의 평균을 계산
- \(v_\pi(s_t) \simeq \frac{V(s_t)}{N(s_t)}\)
- 이 값이 바로 각 상태의 밸류에 대한 근사치
조금씩 업데이트하는 버전
\[V(s_t) = (1-\alpha)V(s_t) + \alpha G_t\]- \(\alpha\): 얼마큼 업데이트할지 정하는 파라미터
- \(\alpha\)가 클수록 한 번에 더 많이 업데이트
- 앞선 방법은 모든 에피소드가 끝난뒤에 평균을 계산하지만 이 방법은 에피소드가 끝날 때마다 값을 업데이트
- 따라서 \(N(s)\)를 저장할 필요가 없음
- 식을 변형하면 위와 같이 표현할 수 있음
몬테카를로 학습 구현
Colab 링크
라이브러리 import
1
import random
환경 class
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
class GridWorld():
def __init__(self):
self.grid_height = 4
self.grid_width = 4
self.y = 0
self.x = 0
def step(self, a):
if a == 0:
self.move_up()
elif a == 1:
self.move_down()
elif a == 2:
self.move_right()
elif a == 3:
self.move_left()
reward = -1
done = self.is_done()
return (self.y, self.x), reward, done
def move_up(self):
self.y -= 1
if self.y < 0:
self.y = 0
def move_down(self):
self.y += 1
if self.y > self.grid_height - 1:
self.y = 3
def move_right(self):
self.x += 1
if self.x > self.grid_width - 1:
self.x = 3
def move_left(self):
self.x -= 1
if self.x < 0:
self.x = 0
def is_done(self):
return (self.y == self.grid_height - 1) and (self.x == self.grid_width - 1)
def get_state(self):
return (self.y, self.x)
def reset(self):
self.y = 0;
self.x = 0
return (self.y, self.x)
에이전트 class
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
class Agent():
def __init__(self):
pass
def select_action(self):
coin = random.random()
if coin < 0.25:
action = 0
elif coin < 0.5:
action = 1
elif coin < 0.75:
action = 2
else:
action = 3
return action
메인 함수
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
def main():
env = GridWorld()
agent = Agent()
data = [[0 for _ in range(env.grid_width)] for _ in range(env.grid_height)]
gamma = 1.0
alpha = 0.0001
for k in range(50000):
done = False
history = []
while not done:
action = agent.select_action()
(y, x), reward, done = env.step(action)
history.append((y, x, reward))
env.reset()
cum_reward = 0
for transition in history[::-1]:
y, x, reward = transition
data[y][x] += alpha * (cum_reward - data[y][x])
cum_reward = reward + gamma * cum_reward
for row in data:
print(row)
main()
학습 결과
1
2
3
4
5
output
[-59.007577406479726, -56.90183068593777, -54.50167451045022, -51.418768506007595]
[-58.12377551489365, -55.02195434629003, -49.98200088681944, -45.52107387155517]
[-55.16971421190278, -50.91111155623804, -41.27547579390701, -30.110230887686804]
[-53.10501746869333, -45.86982600026009, -30.358163650217517, 0.0]
- Chapter 4. MDP를 알 때의 플래닝에서 했던 반복적 정책 평가의 결과와 비슷한 것을 볼 수 있음
2. Temporal Difference 학습
- 몬테카를로 학습 방법론(MC)와 다르게 매 스텝마다 업데이트
- 추측을 추측으로 업데이트
- 한 스텝이 지나면, 즉 조금이라도 시간이 흐르면 조금이라도 더 정확할 예측을 할 확률이 높아짐
- 일요일에 비가 올지 예측할 때, 금요일에 예측하는 것보단 토요일에 예측하는 것이 정확할 확률이 높음
- 따라서 한 스텝이 지난 뒤의 예측을 이용해 이전 스텝을 업데이트하는 방법
- MC는 일요일에 도달한 뒤 금요일와 토요일의 예측을 업데이트
- TD는 금요일에서 토요일로 넘어가자마자 토요일의 예측을 바탕으로 금요일의 예측을 업데이트
- 한 스텝이 지나면, 즉 조금이라도 시간이 흐르면 조금이라도 더 정확할 예측을 할 확률이 높아짐
- 한마디로 temporal difference, 즉 시간적 차이를 이용해 업데이트하는 방법
이론적 배경
\[v_\pi(s_t) = \mathbb{E}_\pi[r_{t+1} + \gamma v_\pi(s_{t+1})]\]- 벨만 기대 방정식에 따르면 \(\pi\)를 따를 때 \(s_t\)에서의 밸류는 \(r_{t+1} + \gamma v_\pi(s_{t+1})\)의 기댓값, 즉 평균을 이용해 구할 수 있음
- 따라서 \(r_{t+1} + \gamma v_\pi(s_{t+1})\)를 구해야 하는 목표, TD 타깃(TD target)이라고 부름
Temporal Difference 학습 알고리즘
- MC와 거의 유사
- 차이점은 업데이트 수식과 업데이트 시점 2가지
업데이트 수식
\[\begin{align} & \textrm{MC}: V(s_t) = V(s_t) + \alpha(G_t - V(s_t)) \\ & \textrm{TD}: V(s_t) = V(s_t) + \alpha(r_{t+1} + \gamma V(s_{t+1}) - V(s_t)) \end{align}\]- MC의 \(G_t\)를 대신해 TD 타깃에 해당하는 식으로 변경
업데이트 시점
\[s_0 \to s_1 \to s_2 \to \cdots \to s_{T-1} \to s_{T}\]- MC에서는 종료 상태에 도달한 뒤 나머지 상태를 업데이트
- TD에서는 각 상태가 끝나고 다음 상태로 전이하자마자 업데이트
- \(s_1\)으로 전이하자마자 \(s_0\) 업데이트
Temporal Difference 학습 구현
Colab 링크
라이브러리 import
- MC와 동일
1
import random
환경 class
- MC와 동일
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
class GridWorld():
def __init__(self):
self.grid_height = 4
self.grid_width = 4
self.y = 0
self.x = 0
def step(self, a):
if a == 0:
self.move_up()
elif a == 1:
self.move_down()
elif a == 2:
self.move_right()
elif a == 3:
self.move_left()
reward = -1
done = self.is_done()
return (self.y, self.x), reward, done
def move_up(self):
self.y -= 1
if self.y < 0:
self.y = 0
def move_down(self):
self.y += 1
if self.y > self.grid_height - 1:
self.y = 3
def move_right(self):
self.x += 1
if self.x > self.grid_width - 1:
self.x = 3
def move_left(self):
self.x -= 1
if self.x < 0:
self.x = 0
def is_done(self):
return (self.y == self.grid_height - 1) and (self.x == self.grid_width - 1)
def get_state(self):
return (self.y, self.x)
def reset(self):
self.y = 0;
self.x = 0
return (self.y, self.x)
에이전트 class
- MC와 동일
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
class Agent():
def __init__(self):
pass
def select_action(self):
coin = random.random()
if coin < 0.25:
action = 0
elif coin < 0.5:
action = 1
elif coin < 0.75:
action = 2
else:
action = 3
return action
메인 함수
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
def main():
env = GridWorld()
agent = Agent()
data = [[0 for _ in range(env.grid_width)] for _ in range(env.grid_height)]
gamma = 1.0
alpha = 0.01
for k in range(50000):
done = False
history = []
while not done:
y, x = env.get_state()
action = agent.select_action()
(y_prime, x_prime), reward, done = env.step(action)
data[y][x] += alpha * (reward + gamma * data[y_prime][x_prime] - data[y][x])
env.reset()
for row in data:
print(row)
main()
학습 결과
1
2
3
4
5
output
[-60.372567351060965, -58.071167742310585, -54.468654594211905, -51.98825942166704]
[-58.022055012339756, -54.95843650901898, -50.146823583397946, -44.89281950301325]
[-54.835277507356764, -49.801453228430326, -42.10082671507283, -30.151509707475636]
[-53.00296752827345, -46.732310433639526, -33.76168890856503, 0]
3. MC vs TD
학습 시점
- MC: 에피소드가 끝난 후
- TD: 한 스텝이 끝난 후
- MC는 종료 상태가 존재하는 MDP에만 사용 가능
- Episodic MDP: 종료 상태가 있어 에이전트의 경험이 에피소드 단위로 나뉘어 질 수 있는 MDP
- Non-Episodic MDP: 종료 상태 없이 하나의 에피소드가 무한히 이어지는 MDP
- MC는 Episodic MDP에서만, TD는 Episodic MDP와 Non-Episodic MDP 모두에서 사용 가능
편향성(Bias)
- MC: \(v_\pi(s_t)=\mathbb{E}[G_t]\)
- 여러개의 샘플이 모일 수록 실제와 비슷해짐
- 여러 \(G_t\)가 모일 수록 실제 \(v_\pi(s_t)\)와 비슷해짐
- \(G_t\)는 \(v_\pi(s_t)\)의 불편 추정량(unbiased estimate)
- 편향되어 있지 않음
- 여러개의 샘플이 모일 수록 실제와 비슷해짐
- TD: \(v_\pi(s_t) = \mathbb{E}[r_{r+1} + \gamma v_\pi(s_{t+1})]\)
- 실제 \(v_\pi(s_{t+1})\) 대신 학습을 할때 사용하는 \(V_\pi(s_{t+1})\)는 예측 값일 뿐 실제 값과는 다름
- 따라서 실제 TD 타깃인 \(r_{r+1} + \gamma v_\pi(s_{t+1})\)는 불편 추정량이지만 학습할 때 사용하는 \(r_{r+1} + \gamma V_\pi(s_{t+1})\)는 편향되어 있음
분산(Variance)
- MC: 분산이 큼
- TD: 분산이 작음
- TD가 작은 시간 단위마다 업데이트하기 때문에(확률적 요소가 적기 때문에) 더 정확
- 서울역에서 부산역 가는 시간을 예측하는 것보다 서울역 앞에 있는 편의점 가는 시간을 예측하는 것이 오차가 더 작음
- 서울역에서 부산역은 1시간 정도 오차가 날 수 있지만 서울역에서 편의점은 커 봤자 5분 내외임
- 비유적으로 MC는 [-10000, 10000] 분포, TD는 [-1, 1] 분포
종합
- 요즘에 나오는 많은 강화 학습 알고리즘들은 대부분 TD를 바탕으로 개발됨
4. MC와 TD의 중간
- MC는 편향성이 없고 TD는 분산이 작다는 장점이 있음
- TD 타깃: \(r_{t+1} + \gamma V(s_{t+1})\)
“꼭 한 스텝만 가서 평가해야할 이유가 있을까?”
n 스텝 TD
\[\textrm{N = n: } r_{t+1} + \gamma r_{t+2} + \gamma^2 r_{t+3} + \cdots + \gamma^n V(s_{t+n})\]n 스텝만큼 진행한 후 가치를 평가
- 예) 2 스텝만 가서 평가: \(r_{t+1} + \gamma r_{t+2} + \gamma^2 V(s_{t+2})\)
\(\textrm{N = 1}\)인 경우(TD 타깃을 이용하는 경우)를 TD(0)로 표기하며 TD-zero라고 읽음
만약 \(\textrm{N = }\infty\)라면?
\[\textrm{N = }\infty \textrm{: } r_{t+1} + \gamma r_{t+2} + \gamma^2 r_{t+3} + \cdots + \gamma^{T-1}R_T\]- 리턴 \(G_t\)가 됨
- 즉, MC는 TD의 한 사례인 셈
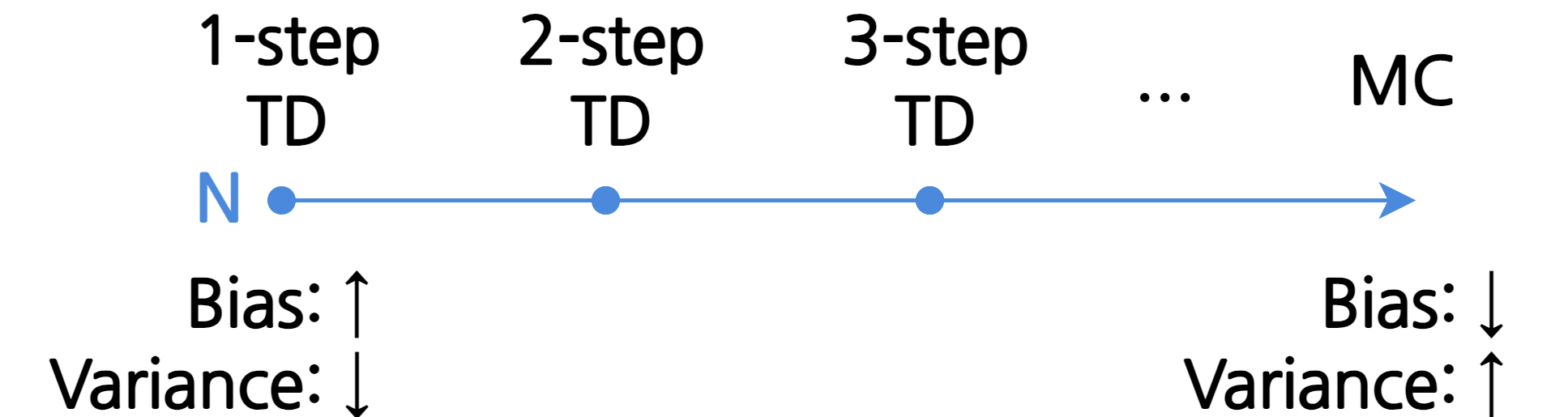
- MC에 가까워질수록 편향은 낮아지고 분산은 높아짐
- \(\textrm{n}\)을 찾는데에 있어 정답은 없음
- 따라서 좋은 \(\textrm{n}\)을 선택하는 것이 중요
This post is licensed under CC BY 4.0 by the author.